سرعت پارامتر بسیار مهمی است که عملکرد تجهیزات دوار، به ویژه سرعت بحرانی تجهیزات دوار، را نشان میدهد. سرعت بحرانی، سرعتی است که در آن فرکانس ارتعاش سیستم با فرکانس طبیعی تجهیزات دوار طنینانداز میشود. پس از تخلیه بار توربین بخار، سرعت مستعد افزایش ناگهانی است. فرض برای جلوگیری از سرعت بحرانی و افزایش ناگهانی سرعت این است که اندازهگیری سرعت باید دقیق و قابل اعتماد باشد. به طور کلی ابزارهای زیادی برای اندازهگیری سرعت وجود دارد، مانند گریز از مرکز (تاکومتر)، القای مغناطیسی-الکتریکی، هال، جریان گردابی، فوتوالکتریک و غیره. دو نوع اندازهگیری سرعت مورد استفاده برای توربینهای بخار عمدتاً القای مغناطیسی-الکتریکی و هال هستند.
۱.۱ حسگر القایی مغناطیسی-الکتریکی
اصل اساسی حسگر القایی مغناطیسی-الکتریکی، القای الکترومغناطیسی است که میتوان آن را به نوع شار مغناطیسی ثابت و نوع شار مغناطیسی متغیر (رلوکتانس) تقسیم کرد. مورد دوم به طور گسترده برای تشخیص سرعت چرخش چرخدندههای مغناطیسی، پروانهها، دیسکهای سوراخدار و غیره استفاده میشود. این حسگر با یک آهنربای دائمی و یک سیمپیچ محصور شده است و یک میدان مغناطیسی در جلوی حسگر تشکیل میدهد. هنگامی که دیسک چرخدنده میچرخد، دندانههای فرومغناطیسی باعث تغییر دورهای شار مغناطیسی سیمپیچ میشوند و در نتیجه یک نیروی محرکه الکتریکی با دامنه متناوب القا میکنند که فرکانس آن به تعداد دندانههای چرخدنده و سرعت چرخش مربوط میشود:
n=60 f/Z
(n—سرعت اندازهگیری شده؛ Z—تعداد دندانههای چرخدنده؛ f—فرکانس نیروی محرکه القایی) وقتی تعداد دندانههای چرخدنده ۶۰ باشد، سرعت n برابر با فرکانس f نیروی محرکه القایی است. عواملی که بر نیروی محرکه القایی تأثیر میگذارند عبارتند از: سرعت سطح صفحه چرخدنده، اندازه و فاصله حسگر و صفحه چرخدنده، و امپدانس مدار اندازهگیری. وقتی شیء اندازهگیری و مدار تشخیص تعیین میشوند، هرچه سرعت بالاتر باشد، نیروی محرکه القایی بیشتر است؛ هرچه فاصله بین حسگر و چرخدنده کمتر باشد، نیروی محرکه القایی بیشتر است.
در یک پروژه خاص، توربین بخار فشار معکوس که پمپ آب در گردش را به حرکت در میآورد، از DCS کنترل مرکزی دانشگاه ژجیانگ و ماژول اختصاصی کنترل توربین بخار آن برای تحقق حفاظت از سرعت بیش از حد توربین بخار (OPS) استفاده میکند و چرخه اندازهگیری سرعت میتواند به 20 میلیثانیه برسد. ماژول اختصاصی، سیگنالهای سرعت 3 مجموعه از حسگرهای شار متغیر در محل را دریافت میکند و همزمان دو سیگنال تماس خشک DI مربوط به قطع سوئیچ و توقف اضطراری را دریافت میکند و سپس یک سیگنال هشدار سرعت بیش از حد توربین بخار سریع و قابل اعتماد صادر میکند و شیر برقی حفاظت از سرعت بیش از حد را از طریق خروجی رله به کار میاندازد تا عملکرد حفاظت از سرعت بیش از حد توربین بخار را تحقق بخشد. لازم به ذکر است که ماژول اختصاصی کنترل توربین بخار باید همراه با یک کارت کنترل اصلی خاص استفاده شود.
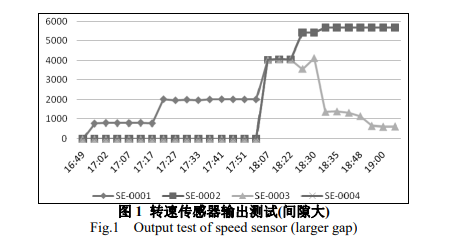
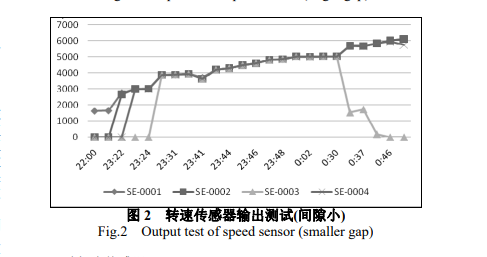
ماژول اندازهگیری سرعت توربین بخار در واقع یک ماژول ورودی پالس نیز هست، اما دامنه سیگنال شناسایی شده بزرگتر از ماژول پالس معمولی، چرخه اندازهگیری سرعت کوتاهتر و دقت بالاتر است. سیگنال حسگر شار متغیر از طریق ماژول پالس معمولی دریافت میشود. هنگامی که پروب سرعت، صفحه دنده و امپدانس حلقه آزمایش کاملاً سازگار باشند، پروب (SE-0002~0004) نیم دور به سمت داخل چرخانده میشود تا فاصله با صفحه دنده کاهش یابد. نتایج قبل و بعد از تنظیم به ترتیب در شکلهای ۱ و ۲ نشان داده شده است. تجزیه و تحلیل مقایسهای به شرح زیر است:
در محدوده سرعت پایین، سه پروب (SE-0002~0004) هیچ دادهای ندارند. پس از افزایش سرعت، میتوان سرعت را به تدریج اندازهگیری کرد. گمان میرود که سرعت سطح در سرعت پایین خیلی کم است و نیروی الکتروموتور القایی پس از فیلتر کردن و تقویت، همیشه پایینتر از حد پایین دامنه سیگنال سطح بالا است و فرکانس سیگنال قابل تشخیص نیست.
در محدوده سرعت متوسط، دادههای سه پروب مشابه دادههای اندازهگیری شده توسط سیستم کنترل سرعت ۵۰۵ (SE-0001) است، که تأیید میکند سیگنال خروجی سنسور شار متغیر دارای مشخصه فرکانسی بر اساس سرعت است؛
در محدوده سرعت بالا، برخی از سیگنالهای خروجی پروب روند اعوجاج آشکاری را نشان میدهند. گمان میرود که نیروی محرکه الکتریکی القایی سیمپیچ پس از فیلتر کردن و تقویت در سرعت بالا، همیشه نزدیک یا بالاتر از حد پایین دامنه سیگنال سطح بالا است و تشخیص فرکانس سیگنال را دشوار میکند.
۱.۲ حسگر هال
پس از اینکه توربین پس از تریپ، درجا کار کرد، بخار جمع شده در سیلندر، دمای سیلندر بالایی را بالاتر از سیلندر پایینی میبرد و باعث گرم شدن ناهموار روتور میشود. با چرخاندن مداوم روتور با سرعت مشخص، میتوان از خم شدن حرارتی روتور جلوگیری کرد. برخی از ساختارهای کلاچ چرخشی نیاز دارند که روتور قبل از چرخش کاملاً متوقف شود، بنابراین لازم است اندازهگیری سرعت صفر تنظیم شود (مفهوم سرعت صفر نه تنها سرعت صفر مطلق است، بلکه نشانهای از عملکرد زیر حداقل سرعت چرخش نیز میباشد). در عین حال، سرعت صفر همچنین میتواند به تشخیص اینکه آیا چرخش به درستی کار میکند یا خیر، کمک کند. بنابراین، چگونه سرعت صفر را اندازهگیری کنیم؟ سنسورهای هال میتوانند این کار را انجام دهند.
حسگرهای هال، حسگرهایی هستند که از اثر هال برای تبدیل کمیتهای فیزیکی اندازهگیری شده به نیروی الکتروموتوری استفاده میکنند. هنگامی که یک ویفر نیمهرسانا در یک میدان مغناطیسی با شدت القایی B قرار میگیرد و جریان I از هر دو انتهای ویفر عبور میکند، یک نیروی الکتروموتوری در جهت عمود بر جریان و میدان مغناطیسی ایجاد میشود. این پدیده اثر هال است. بزرگی نیروی الکتروموتوری U=KIB است، که در آن K ضریب حساسیت هال است که توسط ماده و ضخامت ویفر نیمهرسانا تعیین میشود. میتوان مشاهده کرد که پتانسیل هال مستقل از سرعت است. به طور کلی، یک میدان مغناطیسی پایدار توسط آهنرباهای دائمی تعبیه شده در دندانههای صفحه چرخدنده تشکیل میشود. چرخش جزئی صفحه چرخدنده را میتوان با وجود یا عدم وجود پتانسیل هال تشخیص داد. سیستم کنترل عمومی همچنین دارای محدوده نوسان مجاز خاصی برای سیگنال حسگر است، بنابراین الزامات پایداری جریان در عنصر هال نسبتاً کم است. البته، فاصله بین حسگر و صفحه چرخدنده مستقیماً قدرت میدان مغناطیسی را منعکس میکند، که این نیز نکتهای است که باید هنگام نصب به آن توجه شود.
رابطه بین سرعت و فرکانس اندازهگیری شده توسط حسگر هال با رابطه حسگر القایی مگنتوالکتریک سازگار است که در اینجا تکرار نخواهد شد. حسگرهای هال همچنین میتوانند برای اندازهگیری ارتعاش و جابجایی استفاده شوند.
به طور خلاصه، نوع شار متغیر (رلوکتانس) نیازی به منبع تغذیه خارجی ندارد، اما برای محدودههای سرعت پایین مناسب نیست. به عنوان مثال، ماژول ورودی کنترلر ۵۰۵ نمیتواند سرعت را زمانی که ولتاژ خروجی سنسور کمتر از ۱Vrms (ولتاژ مؤثر) است، اندازهگیری کند. سنسور هال میتواند سرعت صفر را اندازهگیری کند و توانایی ضد تداخل قوی دارد، اما به منبع تغذیه خارجی نیاز دارد و مستلزم آن است که صفحه چرخدنده دارای آهنربای دائمی با قدرت مشابه باشد.
۲ کنترل سرعت
کنترل سرعت توربین بخار ارتباط نزدیکی با کنترل بار دارد و نسبتاً پیچیده است، اما فناوری آن اکنون بسیار بالغ شده و عموماً از طریق کنترلکنندههای اختصاصی مانند ... قابل دستیابی است.
کنترلر 505/505E وودوارد
(
۹۹۰۷-۱۶۲
) و کنترلکننده Peak150؛ واحدهای بزرگ (مانند مجموعه ژنراتورها) را میتوان از طریق سیستم کنترل الکتروهیدرولیک دیجیتال یکپارچه توربین بخار (DEH) نیز به دست آورد، که در آن کنترل سرعت و بار یکی از مهمترین بخشهای سیستم DEH است؛ اگر از توربین بخار برای راهاندازی یک واحد کمپرسور بزرگ با الزامات ایمنی بالاتر استفاده شود، میتوان از طریق سیستم کنترل یکپارچه واحد کمپرسور توربین (ITCC)، مانند سیستم Vanguard شرکت CCC، سیستم TS3000 شرکت TRICON، سیستم Trusted شرکت RockWell T6300 (که قبلاً ICS Triplex نام داشت) به این هدف دست یافت، که میتواند کنترل مضاعف دوگانه یا سهگانه را به دست آورد و عملکردهای یکپارچه آن قدرتمندتر و پیچیدهتر هستند.
۳ سیستم حفاظت توربین بخار
افزایش شدید پارامترهای خاص توربین بخار ممکن است باعث آسیب به تجهیزات یا حتی تخریب دستگاه شود. در میان آنها، سرعت بیش از حد توربین بخار مضرترین است. بنابراین، سرعت بیش از حد توربین بخار ممکن است اقدامات حفاظتی متعددی مانند حفاظت در برابر سرعت بیش از حد و قطع اضطراری داشته باشد. اتصال سایر پارامترهای مهم از طریق سیستم قطع اضطراری برای اجرای خاموشی اضطراری انجام میشود.
۳.۱ سیستم حفاظت از سرعت بیش از حد توربین بخار
۳.۱.۱ حفاظت الکترونیکی سرعت بیش از حد
برای اطمینان از قابلیت اطمینان بالای حفاظت در برابر سرعت بیش از حد توربین بخار، معمولاً از سه حسگر سرعت مستقل و سه ماژول تشخیص (کانال) مستقل برای دستیابی به اثر تحمل خطای افزونه ۲ از ۳ استفاده میشود. هنگامی که دو یا چند گروه از سیگنالهای سرعت بیش از حد مجاز تشخیص داده شوند، بلافاصله یک سیگنال خاموش شدن به سیستم قطع اضطراری ارسال میشود. ساختار تحمل خطای افزونه ۲ از ۳ همچنین به یافتن خطاها کمک میکند. اگر هر گروه از سیگنالها غیرطبیعی باشند، میتوان تعمیر و نگهداری را به موقع و منظم ترتیب داد.
۳.۱.۲ حفاظت مکانیکی در برابر سرعت بیش از حد
محافظت مکانیکی توربین بخار در برابر سرعت بیش از حد از طریق نیروی گریز از مرکز حاصل میشود. هنگامی که سرعت افزایش مییابد، نیروی گریز از مرکز وارد بر وزنه مگس (یا حلقه مگس) دستگاه قطع اضطراری افزایش مییابد تا زمانی که برای جدا شدن از نیروی فنر پیشبار و پرتاب شدن به بیرون، برخورد به دستگاه قطع اضطراری و خاموش کردن توربین بخار کافی باشد. این روش استفاده از نیروی گریز از مرکز مکانیکی برای دستیابی به خاموشی محافظت از سرعت بیش از حد لزوماً خیلی دقیق نیست. به عنوان مثال، مقدار تنظیم سرعت قطع مکانیکی یک توربین بخار کوچک و متوسط در یک پروژه خاص ۶۱۸۰ تا ۶۲۹۴ دور در دقیقه است. در دو آزمایش محافظت از سرعت بیش از حد، دادههای اندازهگیری شده به ترتیب ۶۱۳۷ دور در دقیقه و ۶۱۲۹ دور در دقیقه بودند.
در توسعه مداوم توربینهای بخار، قابلیت اطمینان حفاظت الکترونیکی در برابر سرعت بیش از حد، مانند محافظ GII Protech شرکت Woodward، از نظر فنی ثابت شده است. برخی از کارخانههای توربین بخار به جای حفاظت مکانیکی در برابر سرعت بیش از حد، فقط حفاظت الکترونیکی در برابر سرعت بیش از حد GII را راهاندازی میکنند.

۳.۲ سیستم حفاظت الکترونیکی توربین بخار
علاوه بر حفاظت الکترونیکی در برابر سرعت بیش از حد، شرایط حفاظت الکترونیکی واحدهای توربین بخار عموماً با ارتعاش زیاد یاتاقان، جابجایی محوری زیاد، دمای بالای یاتاقان، فشار کم روغن روانکننده، دکمه توقف اضطراری در محل یا در اتاق کنترل و غیره تنظیم میشود. در واحدهایی با اهداف مختلف، ممکن است دمای بالای روغن روانکننده، سطح پایین روغن در مخزن روغن، فشار بالای اگزوز، دمای بالای اگزوز و سایر شرایط حفاظتی وجود داشته باشد. هنگامی که پارامترهای اندازهگیری شده از حد مجاز فراتر روند، یک سیگنال هشدار و خاموشی صادر میشود [8] و شیر برقی برای قطع تأمین بخار به واحد فعال میشود.
عملکرد حفاظت الکترونیکی توسط DCS محقق میشود و با موفقیت در واحدهای توربین بخار کوچک به کار گرفته شده است. این روش نسبتاً اقتصادی است. با این حال، این امر باید با تنظیم پارامترهای کارت DCS و کوتاه کردن چرخه اسکن محقق شود. هرچه چرخه اسکن کوتاهتر باشد، بار روی کنترلر بیشتر میشود.
واحدهای بزرگ یا واحدهایی که الزامات ایمنی بالاتری دارند، معمولاً از سیستمهای نظارت و حفاظت ایمنی توربین (TSI یا سیستمهای نظارت و حفاظت مکانیکی MMS) استفاده میکنند و برای دستیابی به آن با ESD همکاری میکنند. تجهیزات TSI که معمولاً مورد استفاده قرار میگیرند، در حال حاضر شامل سری ۳۳۰۰ و سری ۳۵۰۰ هستند (
۳۵۰۰/۲۲ میلیون
) از
بنتلی
(اکنون بخشی از
گروه انرژی جنرال الکتریک
) در ایالات متحده، سری EPRO MMS6000 (
A6500-UM
) از
اپرو
(قبلاً فیلیپس) در آلمان، و سری VM600 (
MPC4
) از
ویبرو متر
در سوئیس.
۳.۳ سیستم خاموش کردن اضطراری توربین بخار
سیستم خاموش کردن اضطراری توربین بخار، سیستمی است که حفاظت الکترونیکی، سیستم حفاظت از سرعت بیش از حد و شیر برقی خاموش کردن را به هم متصل میکند. تمام سیگنالهای خاموش شدن تولید شده توسط فرمان خاموش کردن توربین بخار، سیستم حفاظت از سرعت بیش از حد، سیستم حفاظت الکترونیکی، دکمه خاموش کردن و غیره، از طریق شیر برقی خاموش کردن توربین بخار خاموش میشوند تا عملکرد واحد متوقف شود.

۴ نتیجهگیری
پس از درک اصول اندازهگیری سرعت، ارتعاش و جابجایی توربین، تعیین یک راهحل طراحی قابل اعتماد دشوار نیست. با این حال، سیستم کنترل و حفاظت ایمنی ارتباط نزدیکی با مقیاس، شرایط کاربرد و الزامات سطح ایمنی واحد توربین دارد و باید بین اقتصاد و قابلیت اطمینان، تعادل برقرار شود. علاوه بر توربین، بخش کنترل اتوماتیک سایر تجهیزات دوار نیز مرتبط است. درک ویژگیهای تجهیزات تا حدودی برای کار طراحی کنترل اتوماتیک مفید است.
برچسب ها :
نشانی : Unit 1904, No.96-2 Lujiang Road, Siming District, Xiamen
Phone/WhatsApp/Skype : +86 18060982349
پست الکترونیک : sales6@nseauto.com










