با افزایش مداوم واحدهای بزرگ و گسترش مداوم ظرفیت، و حتی ظهور چندین واحد 10 میلیون مگاواتی در حال ساخت و از قبل ساخته شده، اهمیت TSI حتی بیشتر هم میشود. سیستم واحدهای با ظرفیت بالا پیچیده است، محدوده نظارت وسیع است و پروژهها متعدد هستند. بهرهبرداری و نظارت بر اپراتورها باید با یک سیستم نظارت ایمنی قابل اعتماد جایگزین شود تا احتمال سوء استفاده کاهش یابد. در عین حال، برای ماشینآلات دقیق چرخشی با سرعت بالا مانند توربینهای بخار، هرگونه اشتباهی هزینه سنگینی خواهد داشت. یک سیستم نظارتی واجد شرایط و قابل اعتماد میتواند از سوء استفاده و حوادث جلوگیری کند و ایمنی اموال موتور اصلی بزرگ مانند توربینهای بخار را تضمین کند. سیستم TSI که امروز در مورد آن صحبت میکنیم، در شرف عرضه است.
TSI (ابزار نظارتی توربین) یک سیستم ابزار مانیتورینگ توربین بخار است. این یک ابزار مانیتورینگ چند کاناله قابل اعتماد است که میتواند به طور مداوم پارامترهای عملیاتی مکانیکی روتور و سیلندر مجموعه توربین-ژنراتور بخار را اندازهگیری کند، وضعیت عملیاتی دستگاه را نمایش دهد، سیگنالهای خروجی را به ابزار سیگنال ارائه دهد و هنگامی که از حد عملیاتی تعیین شده فراتر میرود، هشدار صادر کند یا حتی به طور خودکار توربین بخار را خاموش کند. علاوه بر این، TSI همچنین میتواند سیگنالهای اندازهگیری را برای تشخیص خطا ارائه دهد و با سایر سیستمها برای تجزیه و تحلیل خطا همکاری کند. (این مقاله از توربین بخار چگالشی دو سیلندر دو ردیفه خنک شونده با هوا SAIC NK600-24.2/566/566 600MW فوق بحرانی با گرمایش مجدد میانی به عنوان نمونه استفاده میکند)
با توجه به موقعیت نسبی بدنه تشخیص، ارتعاش را میتوان به سه نوع تقسیم کرد: ارتعاش مطلق شفت، ارتعاش مطلق نشیمنگاه یاتاقان و ارتعاش نسبی شفت و نشیمنگاه یاتاقان. طبق اصل ارتعاش، مسیر محور را میتوان با ترکیب ارتعاش در جهتهای X و Y بدست آورد. هیچ ارتباط داخلی لازم بین جهتهای عمودی و افقی شفت وجود ندارد، یعنی ارتعاش در جهت عمودی (جهت Y) از قبل بسیار زیاد است، در حالی که ارتعاش در جهت افقی (جهت X) ممکن است طبیعی باشد. بنابراین، یک پروب در هر جهت عمودی و افقی نصب میشود. به دلیل تأثیر صفحه مرکزی افقی بر روی نصب، در واقع، دو پروب میتوانند عمود بر یکدیگر نصب شوند. هنگامی که شکاف بین انتهای سنسور و سطح شفت چرخان تغییر میکند، سنسور یک سیگنال AC به صفحه ارسال میکند و صفحه تغییر شکاف (یعنی ارتعاش) مقدار پیک تا پیک (PP) را محاسبه میکند.
در اندازهگیری ارتعاش شفت، توضیح داده شده است که ارتعاش شفت بزرگ میتواند به پوسته یاتاقان منتقل شود. از حسگر سرعت برای اندازهگیری سرعت حرکت پوسته نسبت به فضای آزاد استفاده میشود. صفحه، سیگنال سرعت را از حسگر تشخیص داده و ادغام میکند، آن را به مقدار جابجایی تبدیل میکند و موقعیت پیک تا پیک مربوطه را محاسبه میکند.

نمودار شماتیک نصب ویبره
۳.۲، جابجایی محوری

نمودار نصب جابجایی محوری

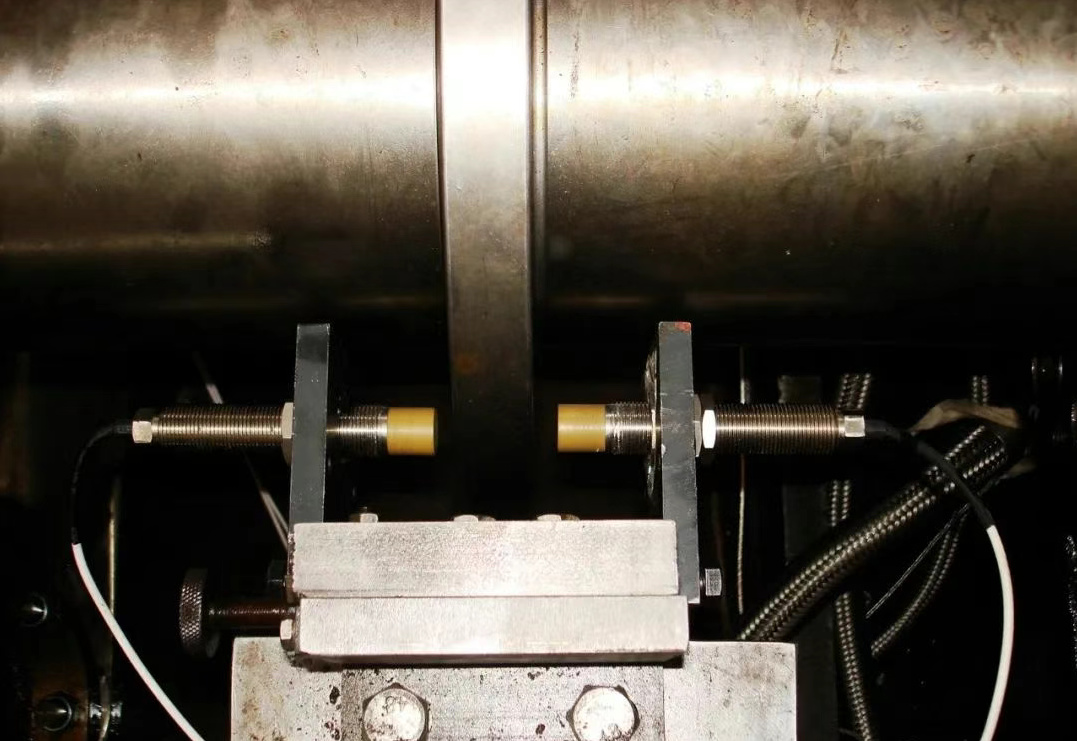
نمودار نصب انبساط اختلاف فشار پایین
انبساط سیلندر، انبساط مطلق سیلندر نیز نامیده میشود. برای جلوگیری از گرفتگی یا حوادث اصطکاک دینامیکی و استاتیکی ناشی از گرمایش ناهموار سیلندر، انبساط سیلندر باید کنترل شود تا ایمنی واحد تضمین شود.

خروج از مرکز، خمیدگی شفت است، یعنی موقعیت شعاعی شفت. در حالت عادی و بدون بارهای داخلی و خارجی روی شفت، شفت تحت تأثیر میرایی فشار روغن در موقعیت طراحی شده شناور خواهد بود. با این حال، هنگامی که دستگاه تحت پیش بار خارجی یا داخلی خاصی قرار میگیرد، ژورنال در یاتاقان خارج از مرکز خواهد بود و اندازه آن با مقدار پیک تا پیک خروج از مرکز، یعنی تفاوت بین مقادیر شدید جهتهای مثبت و منفی خمش شفت، نشان داده میشود.
دستگاه به اصطلاح فاز کلیدی این است که یک شیار کلید روی شفت باز کنید (یا یک کلید برجسته اضافه کنید) و سپس از یک پروب ارتعاش معمولی برای تراز کردن کلید استفاده کنید. هنگامی که پروب کلید را تشخیص میدهد، پیش تقویت کننده یک سیگنال پالس تولید میکند و دوره بین دو سیگنال پالس یک چرخش است. سیگنال فاز کلیدی همچنین میتواند برای نشان دادن فاز ارتعاش استفاده شود. هنگامی که زاویه بین پروب ارتعاش و پروب فاز کلیدی مشخص باشد، میتوان موقعیت جرم نامتعادل، یعنی موقعیت نقطه بالای روتور، را پیدا کرد. این برای تعادل شفت بسیار مهم است.

وقتی توربین با سرعت بالا میچرخد، اگر گشتاور و گشتاور واکنش نامتعادل باشند، سرعت تغییر خواهد کرد. وقتی سرعت از کنترل خارج شود، قطعات با سرعت بیش از حد آسیب میبینند و در موارد شدید، حتی تصادف وحشتناک "ماشین پرنده" رخ میدهد.
برای اطمینان از ایمنی، سرعت توربین باید به شدت کنترل شود. هنگامی که سرعت به مقدار تعیین شده برسد، زنگ خطر صادر شده و اقدامات حفاظتی انجام میشود.
وقتی سرعت صفر در حین خاموش شدن رخ میدهد، مطمئن شوید که چرخدنده به موقع مورد استفاده قرار میگیرد. وقتی دستگاه میچرخد، بالا و پایین دندانه صفحه چرخدنده از طریق پروب عبور میکند و پروب به صورت دورهای سیگنال خروجی، یعنی سیگنال پالس، را تغییر میدهد. برد این سیگنال پالس را برای شمارش و نمایش دریافت میکند و پس از مقایسه آن با مقدار تنظیم شده، خروجی کنتاکت رله را فعال میکند. محدوده اندازهگیری سرعت: 0 تا 5000 دور در دقیقه؛ مقدار تنظیم سرعت صفر، کمتر از 1 دور در دقیقه.



سنسور سرعت برای اندازهگیری سرعت ارتعاش و جابجایی ارتعاش (پس از ادغام) نشیمنگاههای یاتاقان، محفظهها و غیره مناسب است.
اصل کار به شرح زیر است: یک آهنربای دائمی روی محفظه حسگر که به طور محکم روی جسم مورد اندازهگیری ثابت شده است، ثابت شده است و یک سیمپیچ جرم اینرسی آهنربا را احاطه کرده و از طریق یک فنر به محفظه متصل است. در حین اندازهگیری، با لرزش جسم مورد اندازهگیری، آهنربا حرکت میکند و باعث ایجاد حرکت میدان مغناطیسی میشود. سیمپیچ جرم اینرسی زیادی دارد زیرا روی فنر ثابت شده است، یعنی در مقایسه با جسمی با ارتعاش فرکانس بالا نسبتاً ثابت است. به این ترتیب، سیمپیچ به صورت خطی در میدان مغناطیسی حرکت میکند و یک نیروی الکتروموتور القایی ایجاد میکند که بزرگی آن متناسب با سرعت خطی حرکت سیمپیچ (یعنی سرعت محفظه) است. با تشخیص نیروی الکتروموتور القایی، میتوان سرعت خطی جسم مورد اندازهگیری را بدست آورد.
|
پروژه نظارت
|
دسته بندی سنسور
|
سنسور + پیش تقویت کننده
|
مقدار نصب مدل
|
|
لرزش شفت
|
حسگر جریان گردابی
|
تیکیو۴۱۲ + آیکیاس۴۵۲ | ۱۴ |
|
جابجایی محوری
|
حسگر جریان گردابی
|
تیکیو۴۰۲ +IQS452 | ۴ |
|
لرزش یاتاقان (۱ وات)
|
حسگر شتاب
|
CA202 + IPC704 | ۱ |
|
ارتعاش یاتاقان (۲-۷ وات)
|
حسگر شتاب
|
سی ای ۶۸۰ | ۶ |
|
گریز از مرکز
|
حسگر جریان گردابی
|
TQ402+IQS452 | ۱ |
|
مرحله کلیدی
|
حسگر جریان گردابی
|
TQ402+IQS452 | ۱ |
|
سرعت
|
حسگر مغناطیسی-مقاومتی
|
BEF1210 | ۵ |
|
سرعت صفر
|
حسگر جریان گردابی
|
TQ402+IQS452 | ۱ |
|
انبساط اختلاف فشار بالا
|
حسگر جریان گردابی
|
تیکیو۴۰۳ + آیکیاس۴۵۳ | ۲ |
|
انبساط سیلندر
|
حسگر جریان گردابی
|
AE119 | ۱ |
|
نام ماژول
|
مدل ماژول
|
تعداد ماژولها
|
|
ماژول پردازنده
|
پردازنده مرکزی | ۱ |
|
ماژول ارتباطی
|
ام پی سی ۴ + IOC4T | ۹ |
|
ماژول برق
|
پی آر اس ۶ یو | ۲ |
|
ماژول رله
|
آر ال سی ۱۶ | ۱ |
 ۴.۲.۱، مروری بر کارتهای سیستم VM600
۴.۲.۱، مروری بر کارتهای سیستم VM600


۴.۲.۳، نمودار توپولوژی VM600

برچسب ها :
نشانی : Unit 1904, No.96-2 Lujiang Road, Siming District, Xiamen
Phone/WhatsApp/Skype : +86 18060982349
پست الکترونیک : sales6@nseauto.com










